Beyond the Floor Plan
Matthew Fornaciari
mattforni@gmail.com
Framing
This is not a lecture. This is a brown bag.
Ask Me Anything
Understanding is the Goal
Act I
Start at the Beginning
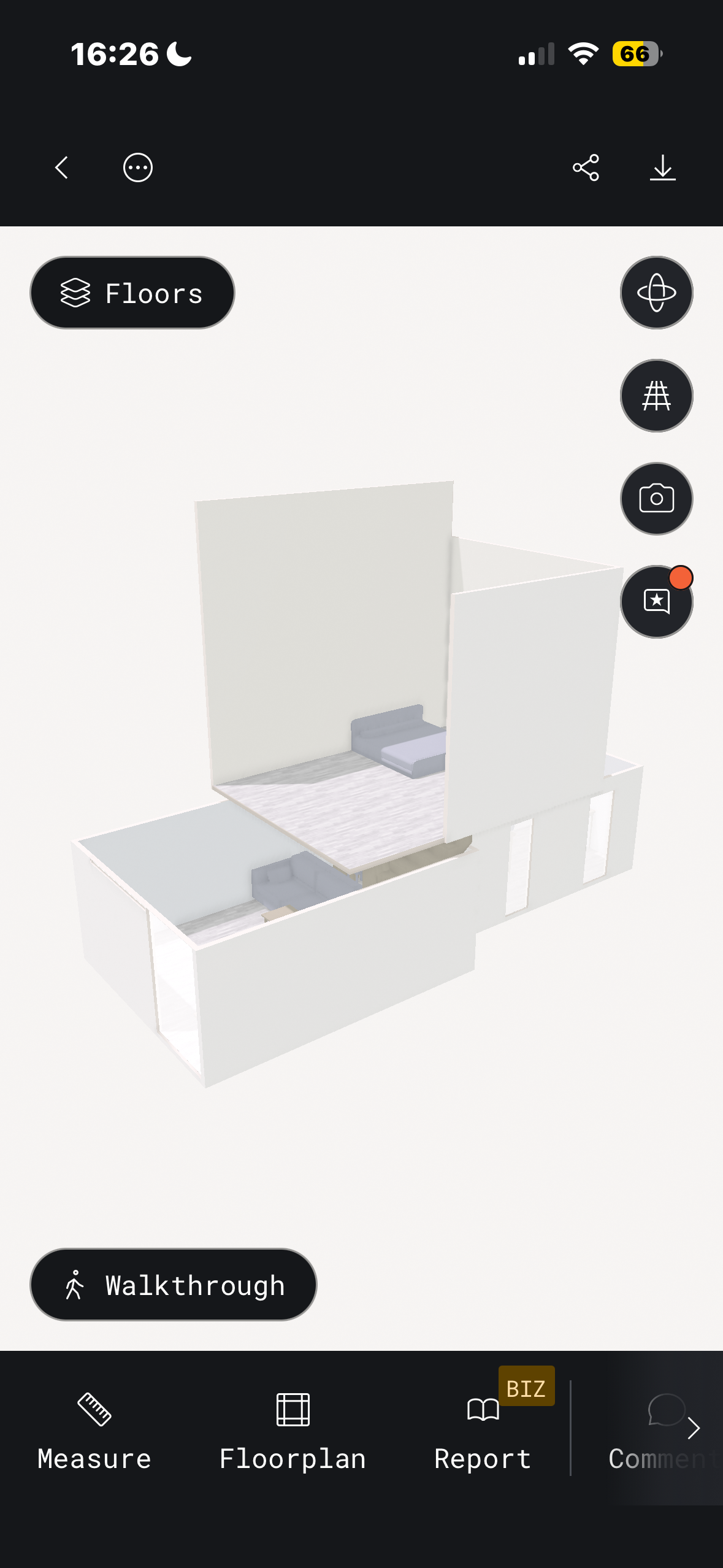
The Existing App
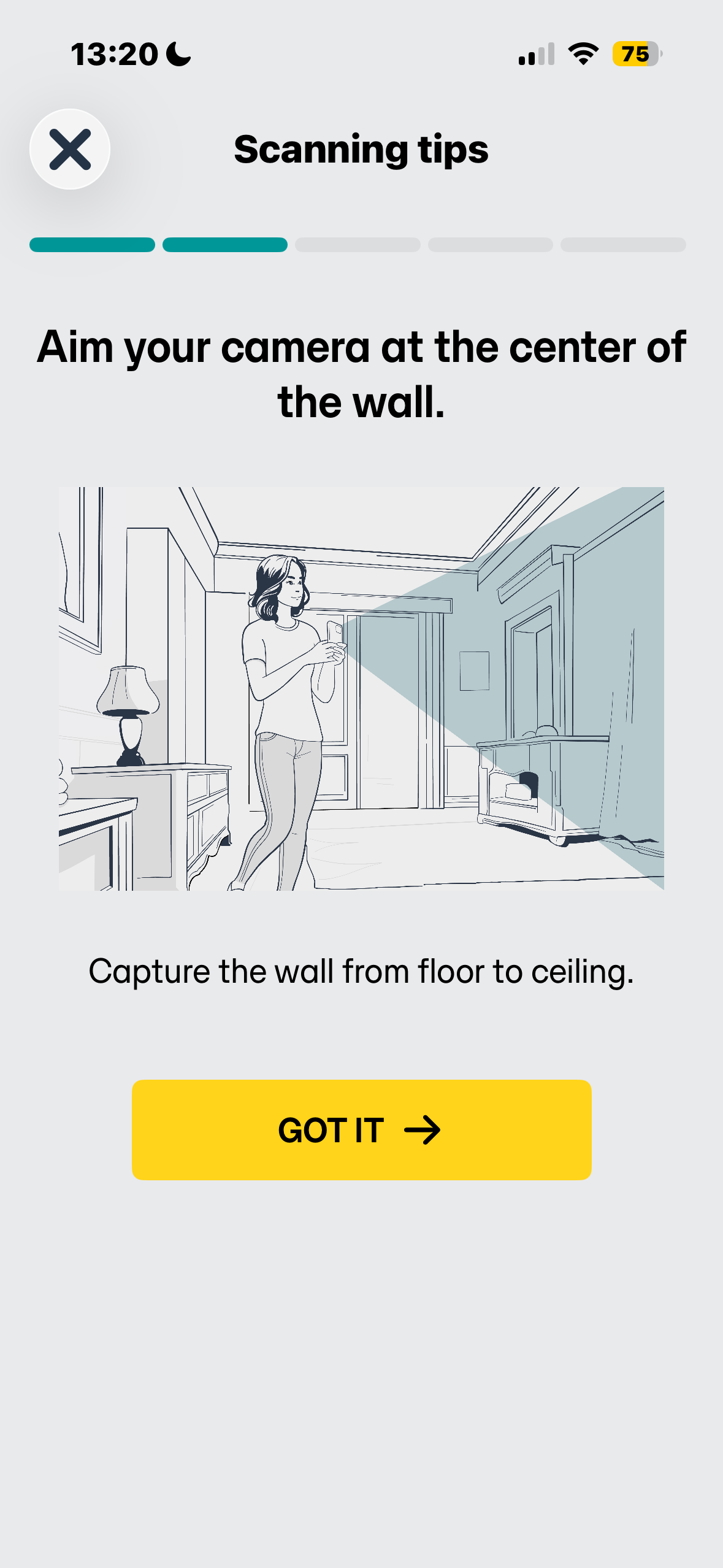

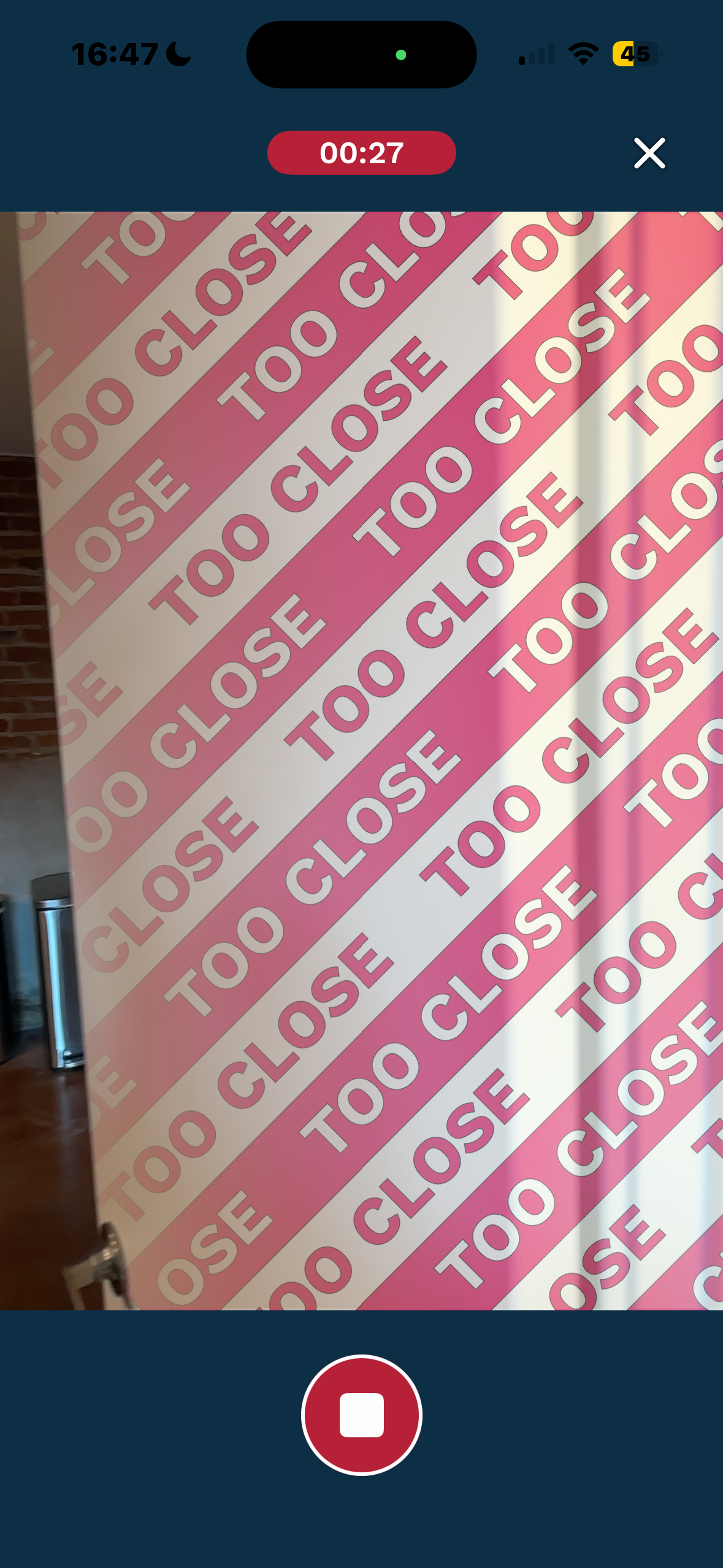
Capture quality matters. The app already knows this.
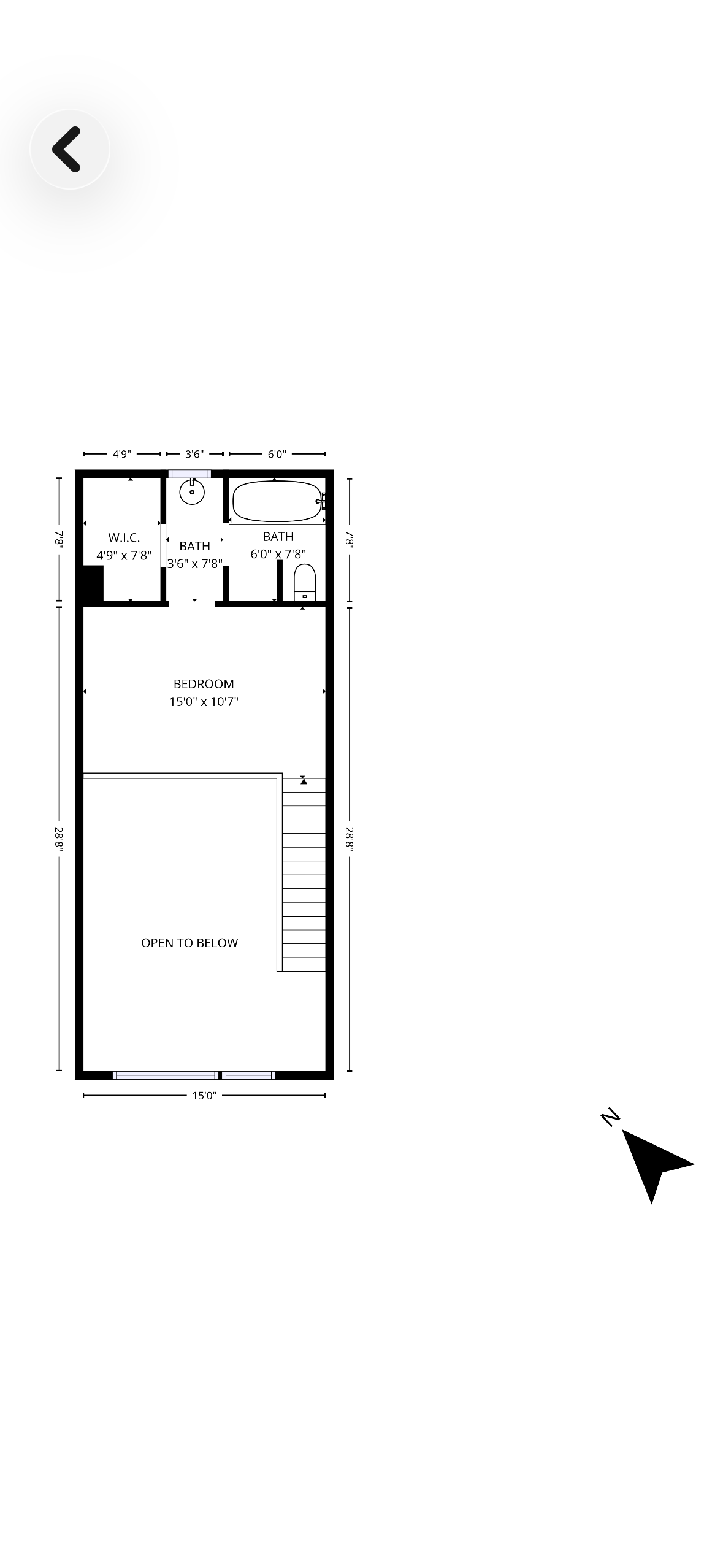
The Output
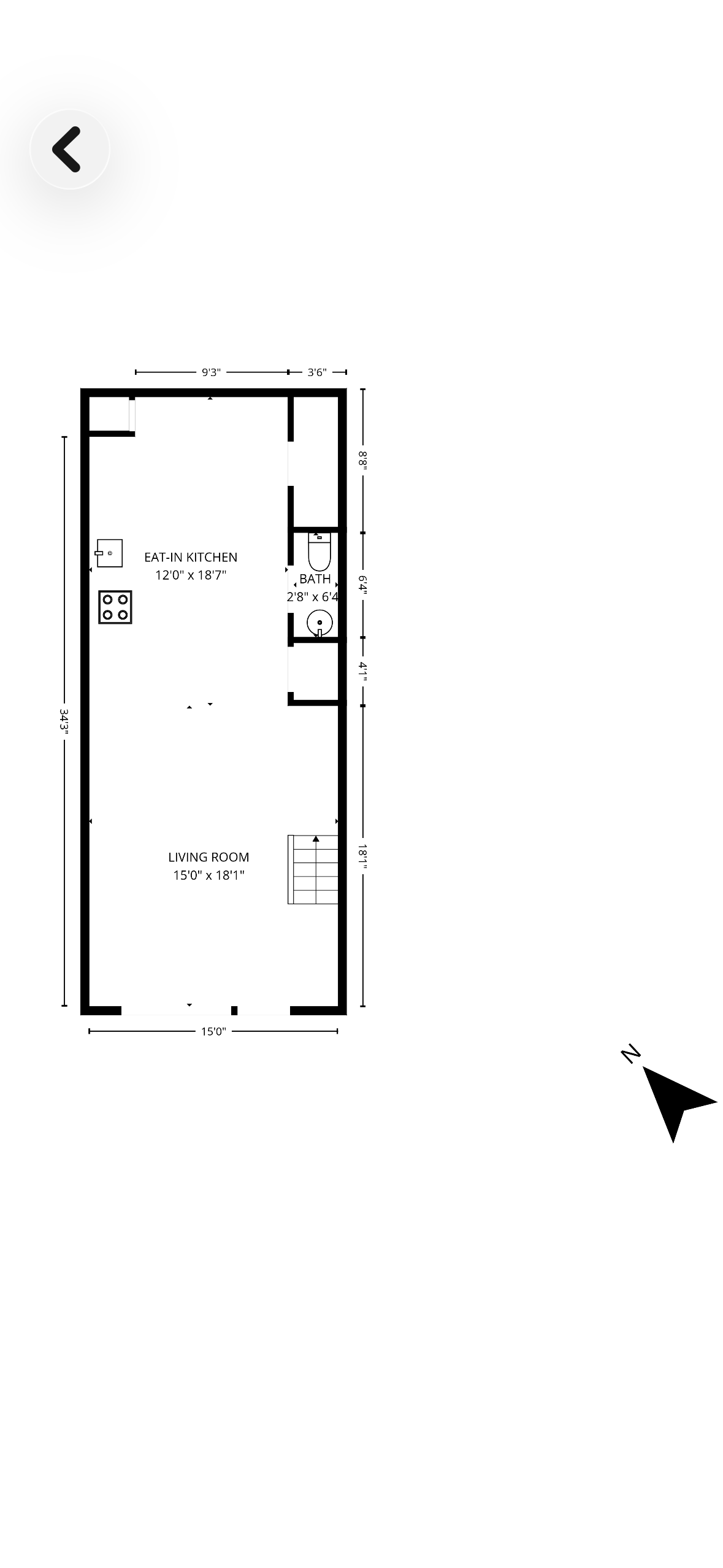
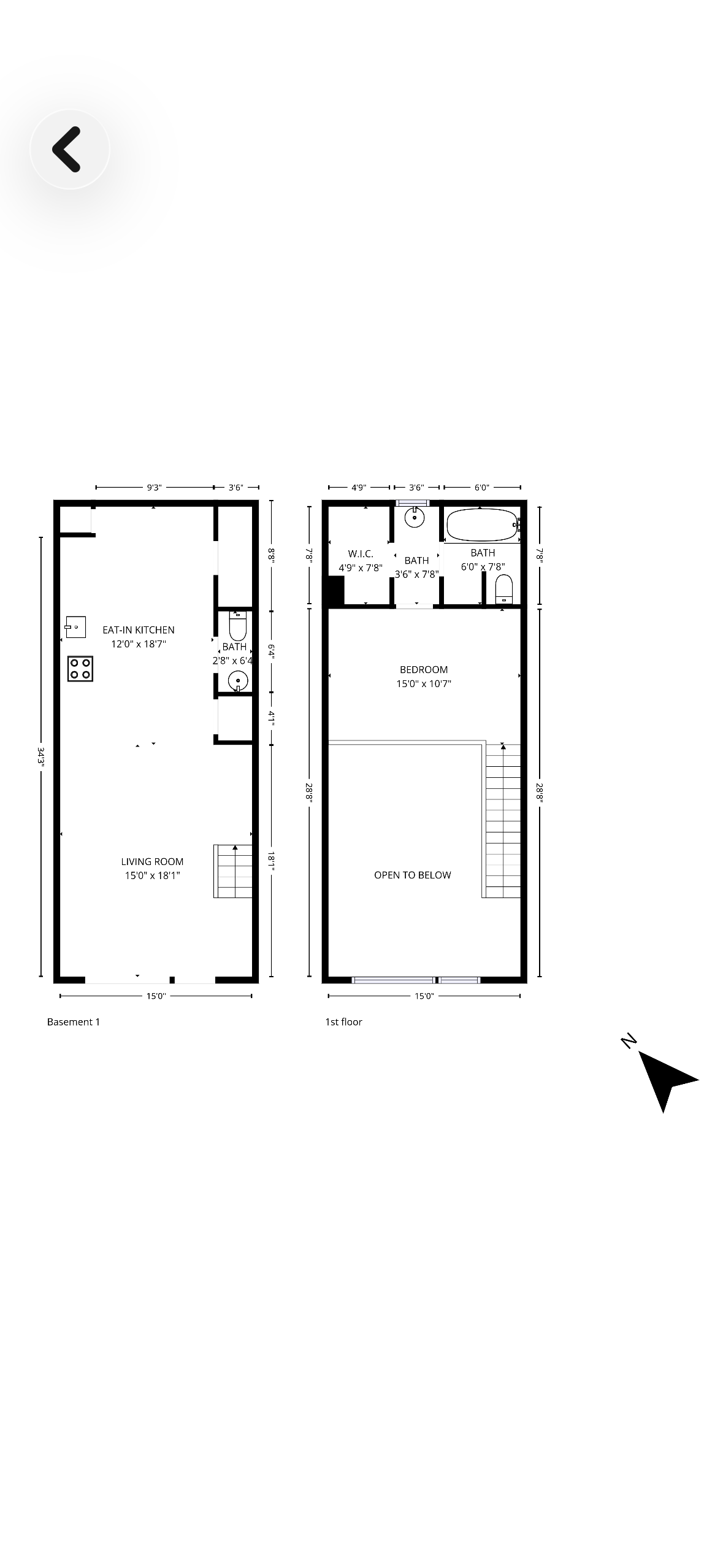
Impressive! This works for a lot of homes.
What About Height?
But we don't live in a flat world ...

Why Height Matters
Two homes with identical floor plans can have wildly different energy needs.
| 8 ft ceilings | → | Standard volume |
| 25 ft ceilings | → | 3x the air to condition |
The volume changes everything for HVAC sizing.
The Challenge
How do we take this 2D representation
and expand it into 3D space?
Act II
Understanding the Constraints
The Gold Standard
Light Detection and Ranging
Emits infrared pulses and measures how long they take to return. Direct distance measurement.
Apple's RoomPlan API + LiDAR would solve this easily.

The Accessibility Problem
LiDAR is iPhone Pro models only.
| iPhone Pro users | ~30-40% of iPhone base |
| iPhone market share | ~55% US, lower globally |
| Android with LiDAR | Rare |
| Total with LiDAR | ~20-30% of users |
Validation
"Focusing on non-LiDAR is correct — that's a foundational design decision for us."
"Better spatial data for sizing would be the priority. The user is an Advisor."
— Justin Holmes
| Constraint | Non-LiDAR first — serve the 70% |
| Priorities |
1. Semantic representation for suppliers 2. Faster feedback loops 3. Photorealistic visualization |
Act III
Exploring the Landscape
The Modeling Stage
| SfM | → | Densify | → | Extract |
| Structure from Motion | Fill the gaps | Get geometry | ||
| Find features, match frames, estimate cameras | Multi-View Stereo (MVS) for geometry, Splats for visuals | Turn points into usable surfaces | ||
| Output: Sparse cloud (thousands of points) |
Output: Dense cloud (millions of points) |
Output: Mesh or planes (usable geometry) |
||
| COLMAP | OpenSplat (Metal) | Poisson, RANSAC, Percentile | ||
| Meshroom, Polycam | COLMAP, OpenMVS (CUDA) | SuGaR, GS2Mesh (CUDA) | ||
| KIRI, Polycam, gsplat |
Two Paths to Densify
After SfM, two paths diverge:
| Densification | Optimizes for | Good for |
|---|---|---|
| MVS | Geometric accuracy | Measurement |
| Gaussian Splatting | Visual fidelity | Rendering |
This maps to the dual audiences:
Suppliers/Advisors need geometry.
Consumers want beautiful visuals.
Build vs Buy
Classic question. I explored both tracks in parallel.
| COLMAP | SfM, sparse reconstruction |
| OpenSplat | Gaussian splatting (Metal) |
| OpenMVS | Dense MVS (CUDA) |
| gsplat | Gaussian splatting (CUDA) |
| GS2Mesh | Splat to mesh (CUDA) |
| Polycam | Full photogrammetry |
| KIRI Engine | Splats only, $500 min API |
| Scaniverse | LiDAR scanning, no API |
| Luma AI | NeRF, slow processing |
The CUDA Wall
Compute Unified Device Architecture
NVIDIA's proprietary platform for running code on their GPUs. Enables massive parallelism for 3D reconstruction algorithms.
I tried to keep things local:
- OpenMVS: needs CUDA
- SuGaR: needs CUDA
- GS2Mesh: needs CUDA
- COLMAP dense: needs CUDA
CUDA does not run on Mac.
The Only Path Forward
With CUDA tools off the table, the only open source path was gaussian splats.
- COLMAP gave me sparse reconstruction
- Built OpenSplat with Metal support on Mac
What Are Gaussian Splats?
A scene represented asfuzzy ellipsoids.
Each ellipsoid has position, size, rotation, color, and opacity. Rendered by "splatting" them onto the screen.
Why they're popular:
- Photorealistic renders from any angle
- Fast to train (minutes, not hours)
- Real-time rendering possible

112K ellipsoids = photorealistic room
OpenSplat Experiments
n=2000, d=1, ssim=0.2
112K gaussians

n=2000, d=2, ssim=0.1
90K gaussians

n=3000, d=1, ssim=0.2
368K gaussians

n=5000, d=1, ssim=0.2
790K gaussians
| n | iterations (training rounds) |
| d | downscale factor (1 = full res, 2 = half) |
| ssim | structural similarity weight (higher = sharper edges) |
Key insight: more iterations ≠ better quality.
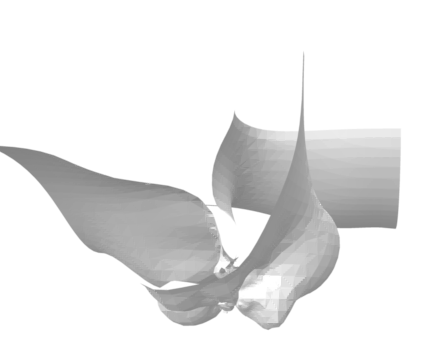
Extraction
Tried to extract geometry via Poisson surface reconstruction.
Principal Component Analysis (PCA) normals
Estimate normals from neighboring points
Quaternion orientation normals
Interpret ellipsoid rotation as surface direction
Both attempts: garbage. Why?
Back to Densify
Turned to commercial tools for reliable dense reconstruction.
KIRI Engine
Good gaussian splats, but inconsistent geometry. Struggled to reliably extract surfaces.
$500 minimum top-up
Polycam
Decent splats, but excels at reliable dense point clouds. Full photogrammetry pipeline.
$400/year Business
Polycam: 1.1M surface-bound points we can actually use.
Dense Point Cloud
1,120,180 surface-bound points
Polycam's photogrammetry gives us real geometry.
Points that actually lie on surfaces. Not optimized for appearance.
Now we can extract structure.
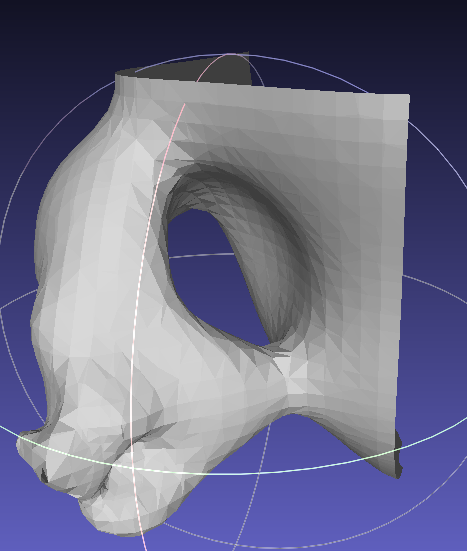
Poisson Mesh Extraction
24,174 triangles
With real surface points, Poisson reconstruction works.
Captures every bump, curve, and imperfection in the room.
Not that useful for visualization.
Probably overkill for Manual J.
What is it we actually need?
The Razor
Dense cloud:
1.1Mpoints
Poisson mesh:
24Ktriangles
Manual J needs:
6planes
Floor. Ceiling. Four walls.
That's it. That's all we need for volume calculation.
Plane Detection
RANSAC
Iterative plane fitting. Sample points, fit plane, count inliers, repeat.
Found 5 of 6 planes. 26.4 × 27.1 × 22.4 ft
💡 Manhattan World
Simplifying assumption: walls perpendicular, floors horizontal, aligned to axes.
Most rooms are boxes. Use that.
Percentile Bounds
Floor: 2nd percentile of Z → lowest points
Ceiling: 98th percentile of Z → highest points
Walls: 2nd/98th of X and Y → room boundaries6 of 6 planes. 23.5 × 24.6 × 22.1 ft. No iterative fitting.
The Output
6 planes
{
"room": {
"width_ft": 23.5,
"depth_ft": 24.6,
"height_ft": 22.1,
"area_sqft": 578.0
},
"calibration": {
"method": "reference_height",
"reference_height": 25.0,
"scale_factor": 1.0
}
}Circle Back: The 25' Ceilings
expected
detected
Vaulted ceilings slope. Percentile bounds find the average, not the peak.
Is it perfect? No. Is it close? Definitely close enough.
For Manual J with 15-25% built-in tolerance? Good enough.
The Punchline
points
planes
The simplest path that actually works.
Act IV
Outcomes & Future Work
What This Means for Zero Homes
What we achieved:
- Volume, not just footprint
- Same video input
- Non-LiDAR by design
A few days of exploration.Proof of concept, not production.
What we don't have yet:
- Windows
- Doors
- Architectural features
For better equipment sizing,we need more semantic fidelity.
The Next Challenge
Semantic segmentation to identify windows, doors, features.
frames
find surfaces
wall, window, door
2D → 3D
walls + windows + doors
SAM 2 is one promising tool. Early experiments show it can track surfaces across video.
SAM 2: Early Experiments
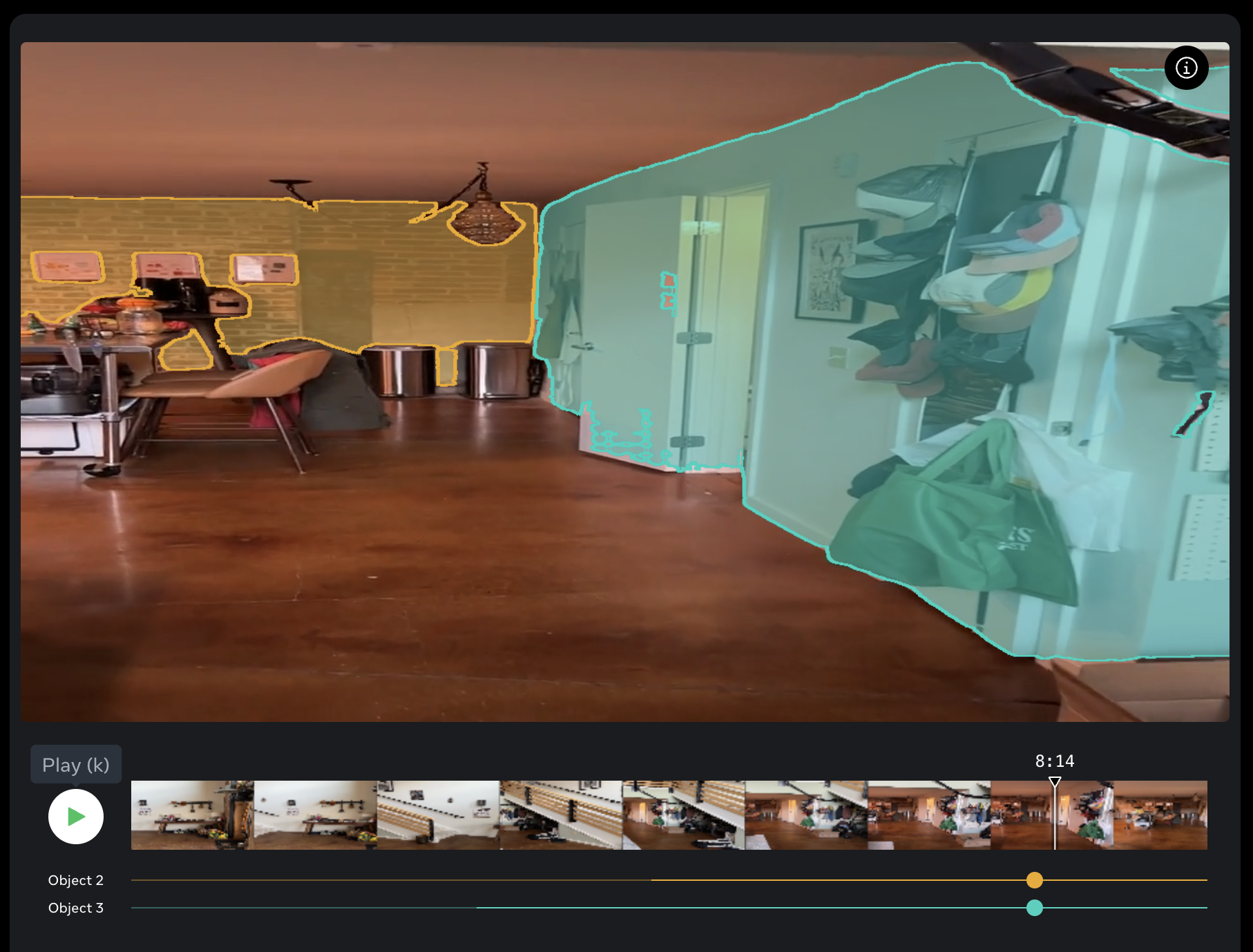

Walls tracked across video. Windows visible (over-segmented into panes).
Needs tuning, but the foundation is there.
Recommended Next Steps
| 1. LiDAR + RoomPlan | For users who have it, use the gold standard. ICP likely has newer iPhones. |
| 2. Semantic Segmentation | Evaluate SAM 2, other tools for identifying windows, doors, features from video. |
| 3. Polycam Partnership | Could abstract the pipeline. Trade-off: vendor dependency. Enterprise inquiry pending. |
| 4. CUDA Methods | SuGaR, GS2Mesh, Dense MVS for higher fidelity non-LiDAR. Cloud GPU when ready. |
Add complexity only when the problem demands it.
Beyond the Floor Plan
Thank you.
Matthew Fornaciari
mattforni@gmail.com